Doing a drawbot...
using servos and arduino
First the results... it really does not work.
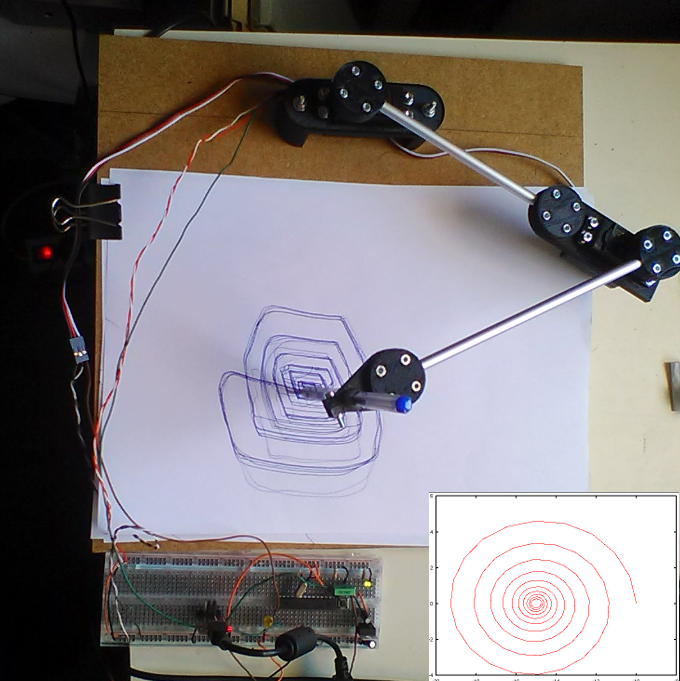
Lots of vibrations and errors... but a lot of fun.
Here's the GNU/Octave code to generate the .ino file.
Happy hacking!
clear all l1=18.5; l2=20; d=-15; n=200; t=linspace(0,20*pi,n); x=d+5*cos(t).*exp(-.05*t); y=5*sin(t).*exp(-.05*t); alpha(1)= -4.5980 beta(1)= 4.3070 for i=1:n-1 aux= newtonsys([alpha(i) beta(i)],[x(i+1) y(i+1)],1e-3,l1,l2); alpha(i+1)=aux(1); beta(i+1)=aux(2); end theta1=-alpha*180/pi-180; theta2=beta*180/pi-180; ## Write to INO filename="~/Arduino/examples/servo/servo.ino" comment_str="This is a comment on the begining of the .ino file ;)"; fid=fopen(filename,'w'); fprintf(fid,'/* %s */\n',comment_str); header_str="\n#include <Servo.h>\n\nServo Servo1;\nServo Servo2;\n\n"; preamble_str="\nvoid setup()\{\n Servo2.attach(10);\n Servo1.attach(9);\}\n\nvoid loop(){\n"; fprintf(fid,'%s',header_str); fprintf(fid,'%s',preamble_str); for i=1:n fprintf(fid,'%s%f%s',"Servo1.write(",theta1(i),");\n"); fprintf(fid,'%s%f%s',"Servo2.write(",theta2(i),");\n"); fprintf(fid,'%s',"delay(100);\n"); end fprintf(fid,'%s',"}"); fclose(fid); ############################################################ figure(1) clf hold on plot(x,y) u=l1*cos(alpha)+l2*cos(beta); v=l1*sin(alpha)+l2*sin(beta); plot(u,v,'r-') ############################################################ figure(2) clf hold on plot(l1*cos(theta1)+l2*cos(theta2),l1*sin(theta2)+l2*cos(theta2),'-') plot(l2*cos(beta),l2*sin(beta),'r-') plot(l1*cos(alpha(1)),l1*sin(alpha(1)),'o') [t' alpha' beta' theta1' theta2']
function Fv=Ffun(x,xpos,l1,l2) Fv(1,1)=xpos(1)-l1*cos(x(1))-l2*cos(x(2)); Fv(2,1)=xpos(2)-l1*sin(x(1))-l2*sin(x(2)); end
function Jv=Jfun(x,l1,l2) Jv(1,1)=l1*sin(x(1)); Jv(1,2)=l2*sin(x(2)); Jv(2,1)=-l1*cos(x(1)); Jv(2,2)=-l2*cos(x(2)); end
function x=newtonsys(xo,xpos,tol,l1,l2) Niter=1000; x=xo'; delta=eye(length(xo),1); i=0; while or(i<=Niter, abs(max(delta))>tol) Jv=Jfun(x,l1,l2); Fv=Ffun(x,xpos,l1,l2); delta=-Jv\Fv; x=x+delta; i=i+1; endwhile endPalavras chave/keywords: arduino, draw bot, Octave, ino
Criado/Created: 30-06-2016 [12:08]
Última actualização/Last updated: 10-10-2022 [14:25]

(c) Tiago Charters de Azevedo